

รายละเอียดสินค้า
| ข้อมูล |
น้ำหนัก
บาร์โค้ด
ลงสินค้า
อัพเดทล่าสุด
|
| รายละเอียดสินค้า |
หุ่นยนต์ชุดนี้จะใช้ตัวถังแบบโลหะ ซึ่งข้อดีของตัวถังที่เป็นแบบโลหะก็คือ มีความมั่นคง แข็งแรงและสามารถเพิ่มอุปกรณ์อื่นๆ เข้าไปในตัวหุ่นยนต์ได้ง่ายด้วยการเจาะ สำหรับระบบ ขับเคลื่อนจะใช้แบบตีนตะขาบซึ่งช่วยให้การขับเคลื่อนไปในพื้นที่ที่ยากลำบากทำได้ง่ายขึ้น ผู้เล่นจะได้เรียนรู้เกี่ยวกับการขับเคลื่อนแบบสายพานส่งกำลัง ซึ่งแตกต่างจากระบบขับเคลื่อน แบบล้อ สำหรับชุดควบคุมจะใช้บอร์ด NodeMCU 1.0 เป็นตัวควบคุมหุ่นยนต์ โดยภายใน บอร์ดจะมีโมดูล ESP8266 ซึ่งมีไอซีไมโครคอนโทรลเลอร์ขนาด 32 บิท อยู่ภายใน มีหน่วย ความจำแบบแฟลชขนาด 4MB รวมทั้งมีโมดูล WiFi อีกด้วย ทำให้สามารถรับส่งข้อมูลหรือ สั่งการควบคุมอุปกรณ์ต่างๆ ได้ เช่น ควบคุมการทำงานของหุ่นยนต์, ควบคุมการเปิดปิดของ หลอดไฟหรือควบคุมการรดน้ำต้นไม้ เป็นต้น นอกจากนั้นที่บอร์ด NodeMCU 1.0 ยังมีไอซี CP2102 สำหรับแปลงสัญญาณ USB เป็น UART เพื่อใช้ในการเชื่อมต่อกับคอมพิวเตอร์ สำหรับโหลดโปรแกรมควบคุมที่เราเขียนขึ้นผู้ใช้สามารถเขียนโปรแกรมควบคุมผ่าน โปรแกรม Arduino IDE หรือโปรแกรมภาษา LUA ได้ ด้วยคุณสมบัติที่กล่าวมา จึงสามารถนำ ไปพัฒนาสู่การสั่งงานผ่านระบบอินเตอร์เน็ตหรือที่เราเรียกว่า Internet of Things หรือ IoT ได้ในที่สุด
นอกจากที่ผู้ใช้ได้เรียนรู้เกี่ยวกับการเขียนโปรแกรมควบคุมแล้ว ยังได้เรียนรู้เกี่ยวกับระบบแม็คคานิกส์ต่างๆ เช่น การทำงานของมอเตอร์เกียร์และสายพานส่งกำลัง เป็นต้น, เรียนรู้การสร้างแอพพลิเคชั่น เพื่อใช้ในการควบคุมหุ่นยนต์และเรียนรู้การทำงานของวงจรอิเล็กทรอนิกส์
ข้อมูลทางด้านเทคนิค
1.ขนาดแรงดันไฟฟ้า : 6-12VDC, 100mA@6VDC (ขณะไม่มีโหลด)
2.ความเร็วสูงสุดของมอเตอร์เกียร์ (ขณะไม่มีโหลด) : 170-350rpm/min  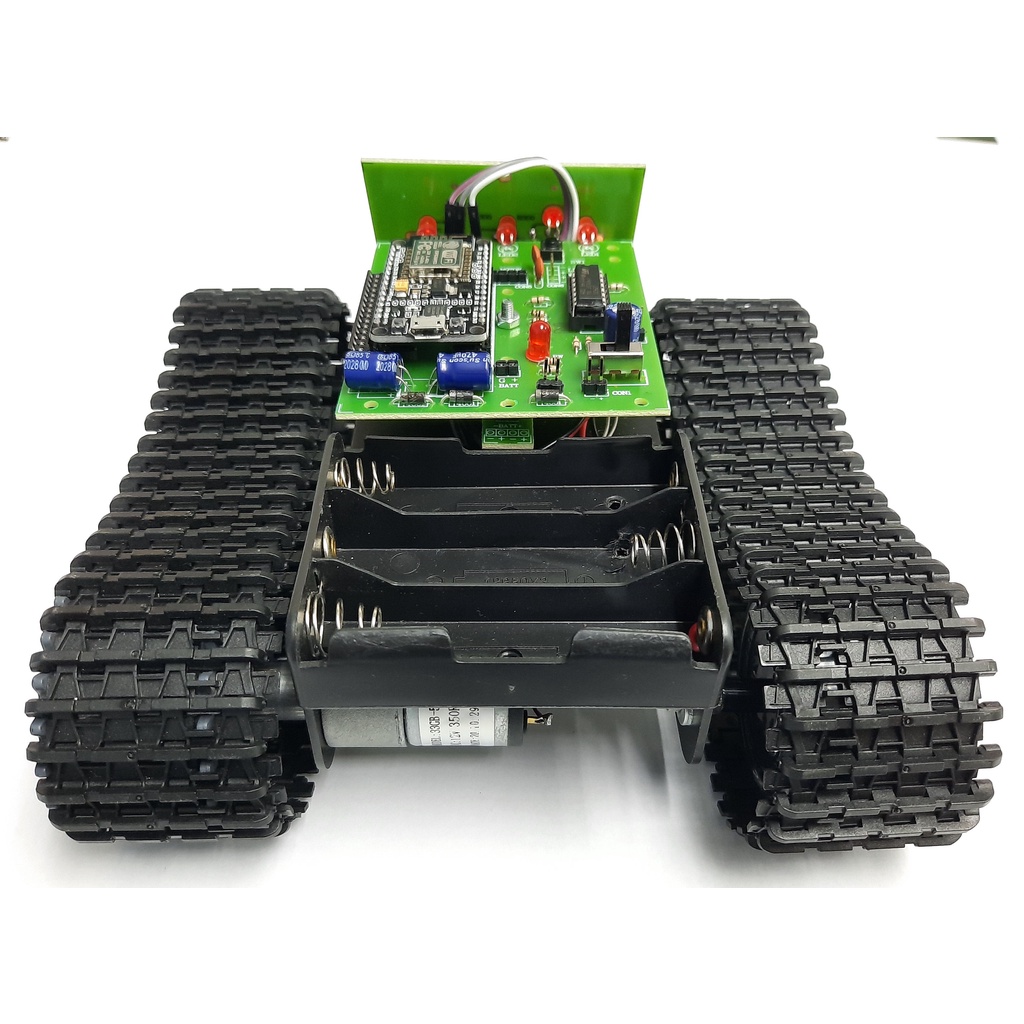   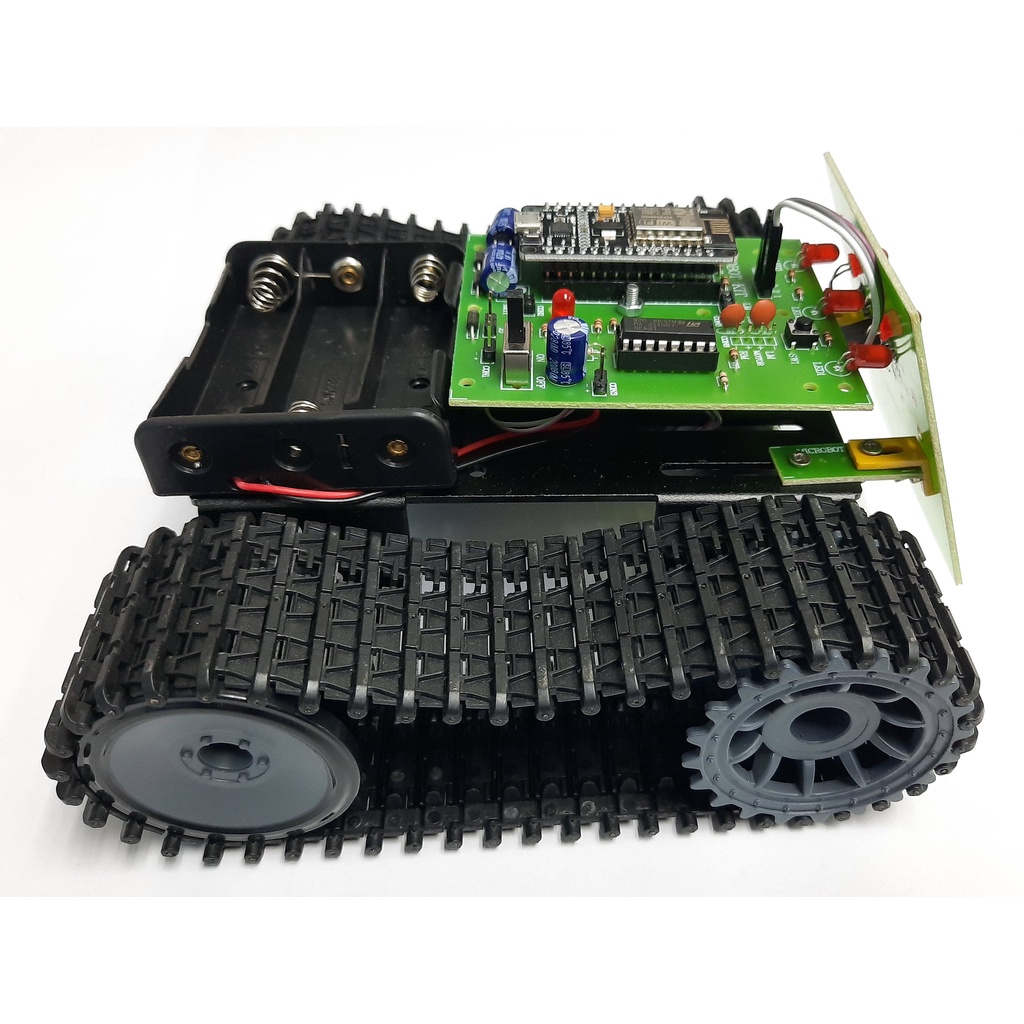  |
| เงื่อนไขอื่นๆ |
|
| Tags |
วิธีการชำระเงิน
ชำระเงินผ่านธนาคาร
นโยบายการเปลี่ยนหรือคืนสินค้า
** ต้องการเปลี่ยน/คืน สินค้า กรุณาติดต่อเจ้าหน้าที่เพื่อพิจารณาโดยตรง **
TEL : 084-025-3442 หรือ LINE ID : @futurekitshop
TEL : 084-025-3442 หรือ LINE ID : @futurekitshop
 Future Kit Shop ชุดคิทอิเล็กทรอนิกส์เพื่อการศึกษา
Future Kit Shop ชุดคิทอิเล็กทรอนิกส์เพื่อการศึกษา
สมัครสมาชิกร้านนี้ เพื่อรับสิทธิพิเศษ
 ธ.กรุงเทพ
ธ.กรุงเทพ

สินค้าในตะกร้า ({{total_num}} รายการ)

ขออภัย ขณะนี้ยังไม่มีสินค้าในตะกร้า
ราคาสินค้าทั้งหมด
฿ {{price_format(total_price)}}
- ฿ {{price_format(discount.price)}}
ราคาสินค้าทั้งหมด
{{total_quantity}} ชิ้น
฿ {{price_format(after_product_price)}}
ราคาไม่รวมค่าจัดส่ง
➜ เลือกซื้อสินค้าเพิ่ม